How Portable Pilot Units (PPU) determine vessel ROT and accurate heading
HDG & ROT
Accurate heading information can be determined in several ways. The AIS plug does not provide heading information with an update rate which is frequent enough to allow any navigation software to resolve the ROT in real time, while a PPU like BANANAS can measure a ROT < 0.1°/min. To understand why this is so, we need to understand the following 3 main viable solutions:
GNSS Sensors – GPS compass
On water, a single GNSS antenna computing a course from point to point will always provide inaccurate results, unlike terrestrial applications, when it comes to marine navigation, to figure the direction of a vessel, one needs to have two precise GNSS antennas placed as far apart as possible. This is commonly referred with the term: GNSS compass (or GPS compass) and it works according to a very simple concept: by pinpointing the exact positions of both antennas, it is possible to work out the orientation of the imaginary straight line across the two.
(The topic of GNSS precision of position was discussed in another article on PPU technology, if you are not familiar with the terminology contained in the next paragraph, we strongly suggest that you read it. the link is here.)
In RTK Terminology, this is a Moving Baseline RTK, useful for GPS applications that require vessel orientation. It is a positioning technique in which both reference and rover receivers can move about. With Moving Baseline RTK, the reference receiver broadcasts data, while the rover receiver performs a synchronized baseline solution. The resultant baseline solution has centimeter-level accuracy. To increase the accuracy of the absolute location of the two antennas, the Moving Reference receiver can use differential corrections from a static source, such as a shore-based reference station.
The formula is: 0.2 degree of accuracy for every meter apart, to have a heading accuracy of 0.01 degree the antennas should be placed 20m apart. The limitations come from the fact that traditional (and old fashioned) PPU have cables between the 2 beacons, so one can gain in accuracy at the price of ergonomics. More recent versions of high precision dual antenna PPU, i.e. made of two wireless beacons, have come to the market to provide the best navigation aid. To understand the technology behind PPU one must also consider that the best systems are a mix of GNSS and Inertial sensors, let´s take a quick look at why this is so.
Inertial sensors
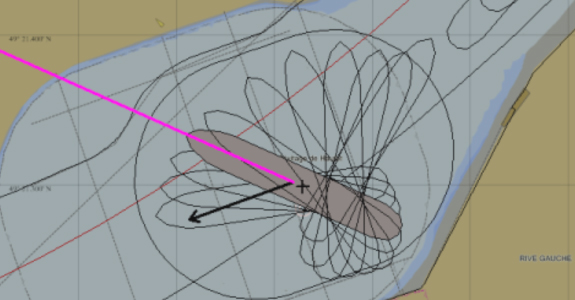
A 3-axis gyroscope is a very good way to determine heading information, some very accurate gyroscopes are made of bulky mechanical parts and cannot be brought onboard. By default, each vessel is equipped with a very good gyroscope, but as already discussed, data from the AIS is far from being in real-time. Some cheaper and lighter electronic equipment, disconnected from the GNSS positioning system, can be brought on board, this does not represent a real PPU, but it is a step forward to help pilots. Some PPU manufacturers have developed some small devices to address the problem of determining an accurate ROT. Manufacturers have tried some techniques to improve its performance, unfortunately, despite attempts, aiding inertial navigation data with magnetometers it is of little help; when it comes to high precision sensors made of compact electronics, a magnetometer is affected by electromagnetic interference and, last but not least, a magnetometer delivers magnetic heading not the true heading, making magnetometers obsolete. To achieve better performance is to primarily rely on fusing inertial navigation data with the position and heading given by the satellites.
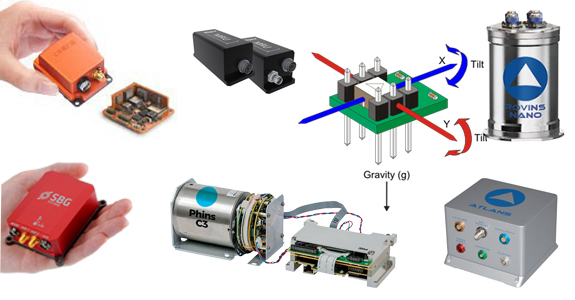
A IMU (Inertial Motion Unit) made of 3-axis accelerometer/gyroscope provides better performance. Some of these sensors are very sophisticated. The most advanced kind works on fiber-optic technology, providing very accurate heading, roll, pitch, speed, heave and position. They can be considered as reliable navigation devices even without aiding from a GNSS positioning system and are often used to navigate submarines or objects into space. Unfortunately, they cost a fortune, they are very large and extremely heavy to carry. Some lighter and smaller versions are quite precise and could work very well as a tool for maritime pilots, but they are still expensive, not so small (probably the size of a bottle) and are accurately reliable without GNSS position aiding for a limited time (a matter of seconds). These types of IMU are commonly used in survey applications which primarily rely on satellite navigation. These devices come in hand in case of absence of satellite reception (dead reckoning) which generally occurs inside tunnels, under bridges and in urban areas. Clearly, not an issue when navigating a 300m cargo vessel.
Therefore, the optimal solution comes from another type of inertial navigation sensors. Since the introduction of Micro-Electro-Mechanical Systems (MEMS), the size of a decent IMU has been enormously reduced a matter of centimeters, their weight to a few hundred grams and their price to around 2,000 dollars. They are less precise but still excellent since they are constantly aided by satellite navigation.
A combination of both GNSS & Inertial sensors (Kalman filter)
A good dual-antenna system (i.e. a GNSS compass) can work without a IMU, the concept of using accelerometers and RTK positioning is rigorously necessary to measure the heave a vessel, which is primarily useful to gage the SQUAT effect. When using a IMU in combination with GNSS sensors, we say that we fuse the GNSS navigation data with inertial navigation data. If accelerometers are not used, the sole use of gyroscopes (even not the most accurate ones) is still sufficient to determine accurate heading, roll, pitch, speed and position. In this case, we do not say that we fuse the data. However, a good PPU still needs to elaborate accurate navigation data from a series of measurements observed over time, containing internal state estimates of a linear dynamic system from a series of noisy measurements and other inaccuracies. For overcoming this difficulty, a good PPU must have an algorithm also known as Kalman filter, which produces estimates of unknown variables that tend to be more accurate than those based on a single measurement alone, by estimating a joint probability distribution over the variables for each timeframe. It sounds complicated, and in fact it is indeed. A good IMU will even have an advanced Kalman filter.

Bottom line: to determine accurate heading and a precise ROT, a pilot ought to have two wireless high-precision GNSS antennas/receivers arranged to implement a GNSS compass with Moving Baseline RTK technique, a good PPU must implements at least a Kalman Filter. If a good MEMS based IMU is embedded inside the PPU, better performance is guaranteed.
Comments are closed.