The performance and the ergonomic aspects of various PPU solutions
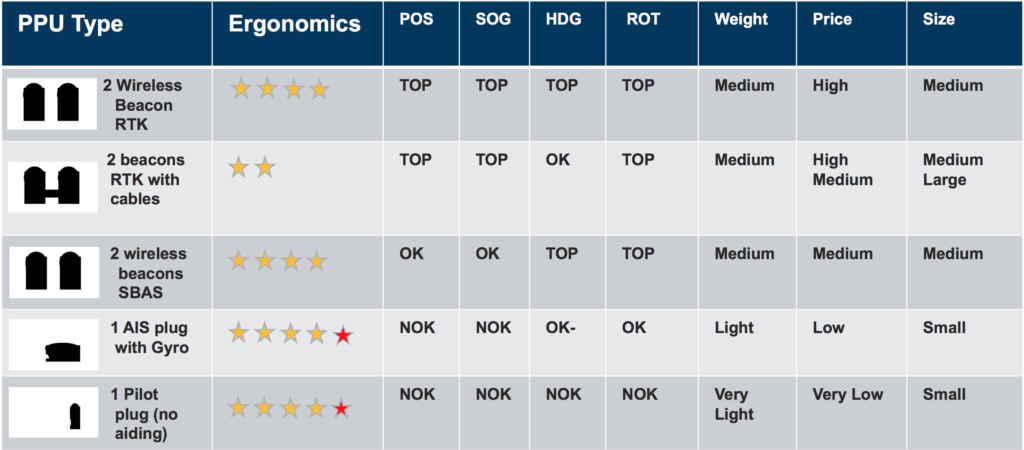
The choice of the right PPU depends on several factors. This approach of comparing PPU types was presented and discussed for the first time at the 2018 IMPA conference in Dakar, in occasion of a presentation held by Cadden on PPU technology. Its content was well perceived. The delegation of international pilots as well as all main PPU vendors attending agreed that this is a good summary of the main types of solutions available nowadays. The interesting thing about this table is that the key performance metrics have been mapped to give a general idea of what to expect from a type of PPU. Ergonomics is also taken into account, as well as the weight and dimension, finally the pricing. Five main types of PPU hardware are considered:
- A PPU made of two wireless beacons with RTK type of precision
- A PPU made of two beacons connected via one cable with RTK type of precision
- A PPU made of two wireless beacons with SBAS type of precision
- A pilot plug receiving navigation data from the AIS and having its own embedded gyro
- A pilot plug receiving navigation data from the AIS without any other type of aiding sensor neither embedded nor connected
Let´s take a look at these one-by-one:
Two wireless beacons with RTK type of precision
- RTK precision means that a GNSS receiver delivers a precision of position of 1cm horizontally and 2cm vertically. This is most accurate precision one can have therefore POS (1cm) and SOG (1cm/sec) rank TOP.
- Since the beacons are not connected by cable, they can be placed far apart from each other and deliver an excellent performance in terms of Heading (see formula) and ROT. Heading and rotation is calculated using GNSS sensors, implementing a so called GPS compass.
- The separate beacons need individual means of power supply, they must have ways to communicate amongst each other and require connecting with a RTK base station based on land. This pose some constraints in terms of volume and weight. This type of PPU is not yet so light and small to be carried inside a pocket, therefore the ergonomics is not the best possible, however, the absence of cables make it simple to use and less prone to points of failure.
- On the other hand, the fact that the two beacons are isolated, means that the cost of the technology behind a multi-constellation RTK GNSS L1/L2 receiver is double making a PPU of this type cost as much as a nice German car.
Two beacons connected by cable with RTK type of precision
- RTK precision is TOP, like in the previous case, so no changes here.
- Since the beacons are connected by cable, they cannot be placed far apart from each other and deliver a good performance in terms of Heading but not the best one can have (see formula).
- The two beacons can be powered by a single battery. They communicate amongst each other via the cable connector which links the two GNSS antennas to the same receiver. This poses less constraints in terms of volume and weight but still makes this type of PPU not so light and small to be carried inside a pocket, therefore the ergonomics is not good at all, especially since cables make it cumbersome to use and set up but also prone to failure.
- The fact that the two beacons not isolated, means that the cost of the technology behind the RTK GNSS receiver is nearly half of the one behind a wireless system which needs two separate receivers, making a PPU of this type cost circa 40% less of an equivalent one wireless. The price is therefore comparable to a modern city car.
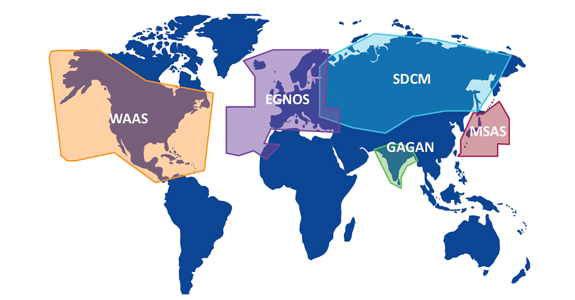
Two wireless beacons with SBAS type of precision
- RTK precision means that a GNSS receiver delivers a precision of position of 50-70 cm horizontally and circa 1-2m vertically. This is OK but still not the most accurate precision one can have therefore POS (50cm) and SOG (10cm/sec) rank OK.
- Since the beacons are not connected by cable, they can be placed far apart from each other and deliver an excellent performance in terms of Heading (see formula) and ROT. Please note that a Moving Base Line (MBL) can be implemented with a so called relativeRTK precision despite the level absolute precision of position delivered by SBAS technology.
- The separate beacons need individual means of power supply, they must have ways to communicate amongst each other. This pose some constraints in terms of volume and weight. This type of PPU is still not as light and as small to be carried inside a pocket, therefore the ergonomics is not the best possible, however, the absence of cables make it simple to use and less prone to points of failure.
- On the other hand, the fact that the two beacons are isolated, means that the cost of the technology behind the GNSS receivers, (which is less than RTK receivers) is still quite high since one needs to have two L1 SBAS GNSS receivers still making a PPU of this type cost as much as a city car.
An AIS pilot plug with gyro
- Using AIS data is a good idea butGNSS positioning is not precise (2.5m-4.0m CEP-Horizontal). Furthermore, SOG is only accurate when navigating offshore, not fit for navigation at slow speed or inside harbours. The AIS provides a low update rate which is not constant. Pilots use pilot plugs mainly for situational awareness. Another benefit is to have the choice of being independent from the ECDIS. Clearly, this solution is not fit for navigation.
- This type of solution must be complemented with other sensors, one of the typical solution is to embed a good gyro inside the pilot plug. This gives ROT which is good enough in some types of non-extreme situations. The heading information provided is not the best one can get but it is still OK. Fusing the data from the AIS with the embedded gyro is the key element which provides the right HDG during the interval between each AIS feeds. However, when the intervals are too long even a good gyro might lose a few degrees per minute.
- The great thing about this equipment is that it is light and small. The ergonomics is high, except that in some cases, the pilot plug on the ship is not wired correctly and this makes it a solution which comes with some risks, therefore it still does rank 5 stars in terms of ergonomics, but it is not the ideal solution.
- The price is mainly driven by the quality of the gyroscope embedded and is equivalent to a moto scooter.
An AIS pilot plug with no aiding
- Same as above, this solution is not fit for navigation but for situational awareness and to be independent from the ECDIS.
- This equipment is light and small. The ergonomics is high, same as above.
- The price of the hardware is mainly driven by the quality of the wireless features (Wi-Fi, or Bluetooth) and some software which helps the configuration. We can safely say that e pilot plug costs as much as a bicycle.