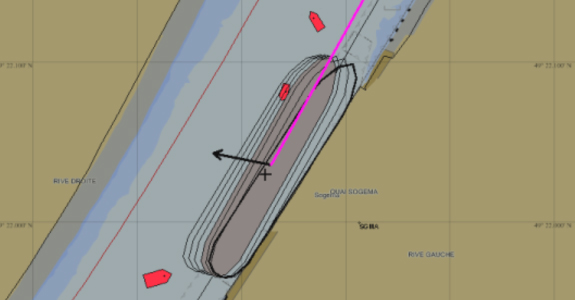
How a PPU determines accurate position and speed
Position & SOG
Pilots are in demand of berthing aid tools that provide accurate vessel location in real-time. There are several ways of providing the necessary positioning/speed accuracy.
A PPU will facilitate efficient and safe manoeuvring within the entire navigation harbour zone enhancing vessel trajectory. To better understand what technological solutions are available to assure accurately positioning of a vessel, the following alternatives must be considered
AIS
The Automatic Identification System (AIS) is a shipboard broadcast system that acts like a transponder, operating in the VHF maritime band and transmitting real time information of the vessel. It relies on GNSS as primary positioning source. The onboard system uses a transponder system that operates in the VHF maritime band and continuously transmits vessels identity, geographic position, speed, course, vessel type, and cargo information along with other relevant information to all other AIS equipped vessels within range, in a real-time automated manner. The AIS uses Self-Organizing Time Division Multiple Access (SOTDMA) technology to meet a high broadcast rate and ensure reliable ship-to-ship operation. The AIS transponders send data every 2 to 10 seconds depending on a vessel’s speed while underway.
Often, pilots use a very light electronic equipment called AIS plug, or Pilot Plug, or AIS Pilot Plug. This genius tool, which can be considered as the precursor of a PPU, is literally plugged into the AIS plug on board and, acting as a sensor, it sends AIS data to the pilot either via Bluetooth or Wi-Fi. Besides the fact that a pilot plug costs only a few hundred dollars, it can be put inside the pilot´s pocket and it has a very long battery autonomy. As of today, it is the most widely used navigation aid tool by maritime pilots.

The problem is that the GNSS position Accuracy from AIS is generally 2.5m-4.0m CEP-Horizontal so a pilot lacks control of precision, he cannot always trust to receive the necessary berthing aid in terms of precision of position, so a pilot gets what he gets…. Data accuracy is limited to a degree of precision which might not be sufficiently high, causing a poor evaluation of speed. Besides, if one considers that data is provided with a very low update rate, the SOG is not calculated with the accuracy required in difficult situations, furthermore, a low update rate, makes any sophisticated feature of the pilot software giving a predicted position of the vessel, obsolete.
SBAS
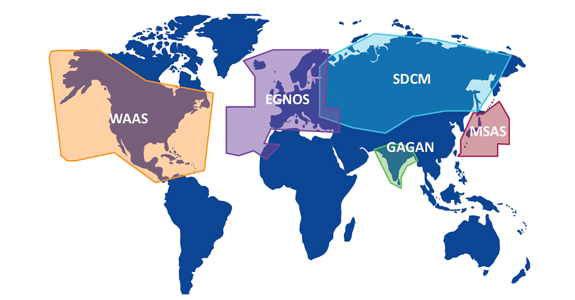
When it comes to improving position, a Satellite-based Augmentation System (SBAS) is a good alternative. Using geostationary satellites which broadcast the augmentation information, it is possible to greatly improve the position accuracy to 0.5m-1m CEP-Horizontal.
A relatively important limitation is that the its network coverage is not global, WAAS operates in North America, EGNOS in Europe, SDCM in Russia, GAGAN in India, MSAS in Japan, BDSBAS in China, so it is mainly in the northern hemisphere.
Finally, although SBAS is indeed widely used and rather precise in most applications, it does not deliver the highest precision needed in extreme cases where SOG must be precise. The precision or position on the vertical axis is circa double the horizontal accuracy, limiting in some case to navigate in shallow water, where UKC must be strictly calculated.
Altogether, when it comes to speed accuracy, it is a good GNSS technology, although in some cases it is necessary to bring their own receiver on board, hence you need a PPU. In fact, the most sophisticated receivers are generally not available on board. SBAS receivers operate mainly in single point position (SPP) mode and estimate velocity either by differencing two consecutive positions (i.e., approximating the derivative of user position) or by using Doppler measurements related to user-satellite motion.
The former approach is the simplest to implement, but it has a meter per second–level of accuracy due to the dependence on pseudorange-based position accuracy. In contrast, Doppler frequency shifts of the received signal produced by user-satellite relative motion enables velocity accuracy of a few centimeters per second.
L-BAND
Another viable alternative is to have a receiver so called L-Band (RTX) which provides an accuracy of position in the range of 1 decimeter: 4cm -10 cm CEP-Horizontal.
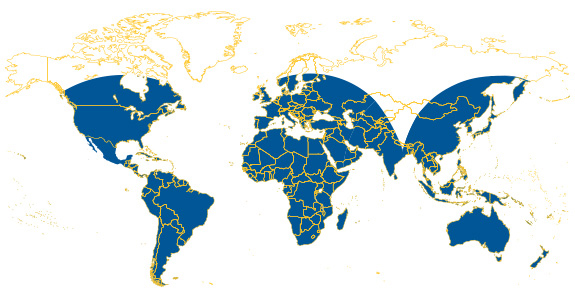
Besides the fact that its initiation time can take several minutes, a PPU based on this technology is great. Likewise SBAS, it is a correction service which can be delivered via satellites, i.e no need of a land base station, receiver modem, antenna, clear line of sight etc…. Its coverage is global and it is a paid service (a couple of thousand dollars per year). This is a new technology delivered by Trimble (see Trimble Centre Point RTX) and not all GNSS receivers are equipped with this sort of advanced algorithm. Pilot must have a dedicated antenna/receiver, i.e. a PPU
RTK
When it comes to high precision navigation, the best approach is Real-Time Kinematics (RTK) which provides an accuracy of position or 1cm-2cm CEP-Horizontal. RTK delivers outstanding performances in terms of precision and velocity can be calculated with an accuracy of 1cm/sec. Furthermore, the technology can be used as relative positioning system (a.k.a. relative RTK), meaning that it is possible to evaluate with extreme accuracy the distance between a RTK base and RTK rover, this has enormous applications in off-shore operations and for a implementing the so called Moving Baseline RTK, that is, a technique useful for GPS applications that require vessel orientation.
When used as an RTK rover, i.e. inside a harbor, it requires a base station on land to deliver the corrections: a receiver requires integrating a radio modem, receivers and having either a good line of sight or mobile data coverage (when over IP). It must be pointed out that these are not real issues. Differential correction services nowadays is a challenge of the past, several operators worldwide have equipped harbours with networks of base stations, mobile network technology works. The issue comes for the need of having such smart electronics available on board. In most cases, this type of precision equipment must be brought on board by pilots. Such tools are typically used by land surveyors and they generally are, heavy, bulky and full of cables. Not so ergonomic for a pilot to bring on board. That is why PPUs are adapted around the needs of pilots who must bring onboard light and easy to carry equipment with little amount of cables (or none at all, if possible).
Precision and sophistication has a price tag. A good RTK receiver which works on all GNSS constellations (GPS, Glonass, Beidou, Galileo), with UHF/GSM modem, and an output at 20Khz + RTK correction service can costs USD 15,000. Most PPU consist of a dual-antenna system, so the price range is far from a pilot plug, but so is its performance.
Comments are closed.