Secondary performance factors which make a good PPU
Secondary factors which make a good PPU
In previous articles, some key facts which make the basis of a performant PPU were discussed. There are several other factors which should be studied. In this article we discuss only three of them:
Motion Sensors
As far as a PPU technology is concerned, the roll and pitch of a vessel can easily be determined with gyroscopes. On the other hand, speed and position, as well as accurate heading, are largely measured with a GNSS system. As already discussed in the article about orientation, sophisticated inertial sensors, at least within the context of piloting inside harbours, provide the added value to measure the vertical heave of a vessel, only if they are equipped of accelerometers, in which case, they are generally referred as: Inertial Motion Unit (IMU). Some MEMS-based IMU are a good option only when a vessel is moving quickly through shallow water.
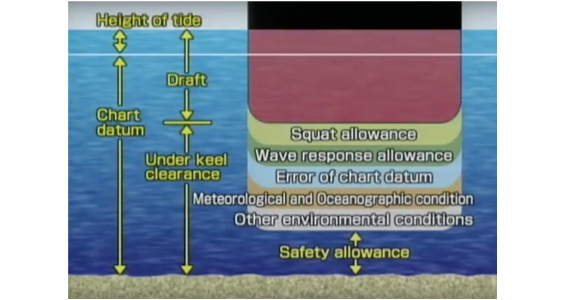
An IMU can flag the imminent SQUAT effect created by an area of lowered pressure that causes the ship to be closer to the seabed than would otherwise be expected. Of course, this is only possible if inertial data is aided by a high-precision GNSS system and if a SQUAT software algorithm is smart enough to give suitable alert. The amount of squat will depend upon several factors but in certain conditions it may be as much as two meters and a good inertial navigation system can feel a heave change of a few centimeters even if it occurs slowly. The asymmetric flow of water around the stern frame reduces the power of the rudder, making steering more difficult and losing stability. The vessel might experience yaw and roll. This is how pilots are alerted of SQUAT already happening. So, a sophisticated PPU as such, can be of good aid to give pilots an early warning. A minor heave change is otherwise impossible to feel without auxiliary sensors, unless the SQUAT is already occurring, and that can be dangerous.
Hyper connectivity
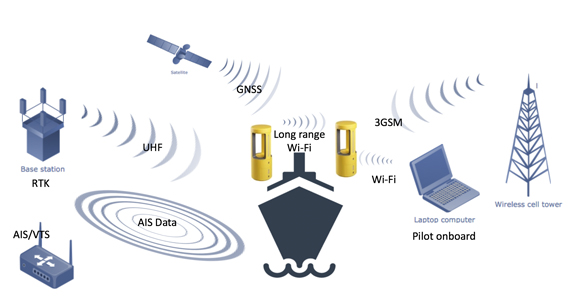
As technology innovation evolves, solutions around VTS become sophisticated. Reliable monitoring of all maritime traffic brings enhanced situational awareness. The picture provided is getting increasingly accurate. Modernization, is giving the ability to integrate data from multiple sensors such as AIS, Radar, CCTV, live weather streaming, real-time feeds from hydrological monitoring systems, drones and much more. Integration is taking place, so is real-time digital display technology in 2D and 3D, which gives an amazing picture of ports and waterways. Nobody knows what the future holds but the idea is becoming quite clear. As far as modern PPU technology is concerned, more situational awareness can be given if a PPU is communicating with the VTS.

If a PPU is equipped with sufficient telemetry equipment such as modems and antennas to work on 3G/4G cellular and UHF/VHF radio and AIS transceivers. Suddenly the PPU becomes another integrated sensor. Some PPUs have a slot where to insert a SIM card, others can even handle two SIM cards and concurrent mobile internet connections.
High precision PPU are meant to be in constant radio connection to UHF/3G base stations to acquire RTK differential corrections. Pilots use Wi-Fi or Bluetooth connections to dialogue with the device. Long-range Wi-Fi allows radio communication to a range of a couple of hundred meters. These are all very important features to be considered when investing in a PPU.
Last but not least, the update rate with which the PPU sensor sends data to the navigation software, is a key factor which falls within the category of hyper connectivity. Generally, the software used by pilots reads data which comes in a format so called NMEA. The string contains navigation data and ought to be sent quite often as input to the pilot software so that it can make the necessary computations to show position, orientation, predicted position and so on. The throughput of a radio link can be strongly affected depending on the amount of information sent and depending on the frequency of these updates. A PPU should send data anywhere between 2 and 5 times per second. Anything above is unnecessary but anything below 2Hz is really not recommended.
Hot-swappable safe battery
Battery autonomy is always a worry for pilots, especially in operations lasting several hours. From the PPU manufacturers´ standpoint, it is more an affliction because the way to provide very long autonomy is by placing very large Lithium-Ion rechargeable battery which poses two big problems.
- Extra weight, limiting the ergonomics of a portable system.
- If overheated or overcharged, Li-ion batteries may suffer thermal runaway and cell rupture. This can lead to leakage or explosion. A faulty battery can cause a serious fire. Faulty chargers can affect the safety of the battery because they can destroy the battery’s protection circuit. Often a device which contains this type of batteries is not allowed on board of vessels carrying explosive goods and they are not allowed on planes and helicopters.

The only solution to these issues is to provide smaller batteries which are safe.
A nickel–metal hydride battery, abbreviated NiMH is the safest approach, they cost more but that is nothing compared to the threat they represent. Size reduction to assure a lighter PPU with NiMH batteries is tricky, that is, without ultimately affecting the autonomy of the device. Fortunately, the technology exists today to provide hot-swappable NiMH batteries. A safe battery of average small size and low weight can last 6 to 10 hours, it can be recharged in 3 hours and, if necessary, it can be replaced without causing power loss during operations. This means, endless autonomy and good equipment safety.
Comments are closed.